What about Bob?


If you have been following along here or on Discord then you already know what this post will be about, my InMoov robot named Bob. One might say the work is never done but Bob is assembled and functional so I am about as close to done as I will ever be!
Let me get this out of the way so the right person gets credit :) InMoov was created & designed by Gael Langevin (https://inmoov.fr/) and are shared under Creative Commons V3.0 attribution non-commercial (CC BY-NC 3.0).
I continue to be impressed by Gael's imagination and insight in creating such a work of art and ingenuity. Thank you again and again for sharing your creation with me and the world. There are also MANY modifications and spin-offs available, mostly for free, so if anyone is interested - get to searching and making!
Basics
Bob is printed 100% with SUNLU filaments, a combination of Skin/Beige PLA and, after some trial and error, White PETG for the more mechanical prints. Most of the parts are sourced from AliExpress and Amazon although a few items are from local hardware stores and international companies as well. My advice to anyone that builds InMoov or any other large project is to plan out as best you can. I accumulated an enormous amount of surplus parts such as screws, bolts, etc due to reactionary purchasing. For example, I would need a few screws that I had not planned on so I would buy a kit from Amazon for the speediness of delivery. Let's just say this happened about a dozen times (don't judge me) and now I have a plethora of screws, nuts, and bolts. At least I have hardware for my future builds right?
Okay, enough with the digression and back to Bob!
Bob is right at 6' tall (about 183cm for you across the pond) although his current mounting has him at 6' 8" (as if I did not already feel short). I do not have the means to weigh him properly but fully loaded with all his electronics I would guesstimate he weighs in at ~150 lbs (got me beat there too).
Functionality

Bob's head has two Microsoft LifeCam HD-3000 as eyes which can move on both x and y axis. He has microphones in his skull (might relocate to ears later) and a speaker in his jaw. When he speaks, his jaw will move in almost real-time to match. Bob's neck can rotate and tilt on three axes (I had to triple check the plural of axis).

Both arms are capable of rotating, moving forward and backward, as well as up and down away from the torso. Bob's elbows are somewhat limited with about 35 degrees of movement. His wrists can rotate and each finger has 2 to 3 pivot points allowing Bob to fully open or close his hands or any single digit.
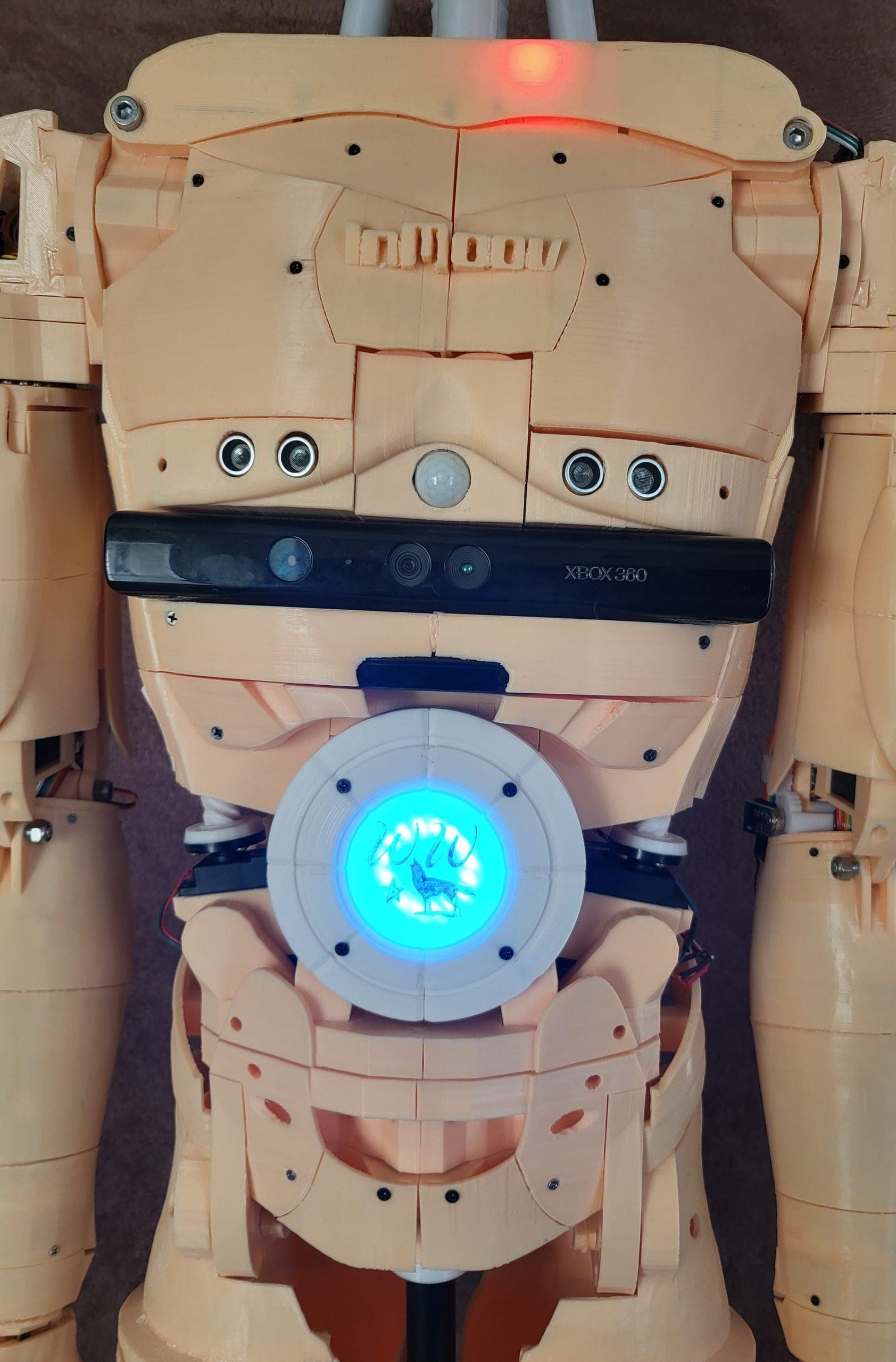
For Bob's chest and torso, he can rotate left to right and lean side to side. He has two HC-SR04 distance sensors and a HC-SR501 PIR infrared motion sensor. He also currently has a Microsoft Xbox 360 Kinect module but it is not designated to any function (maybe someday). Bob has two LED systems; One is a 32 LED strip and the other is a 16 LED ring.
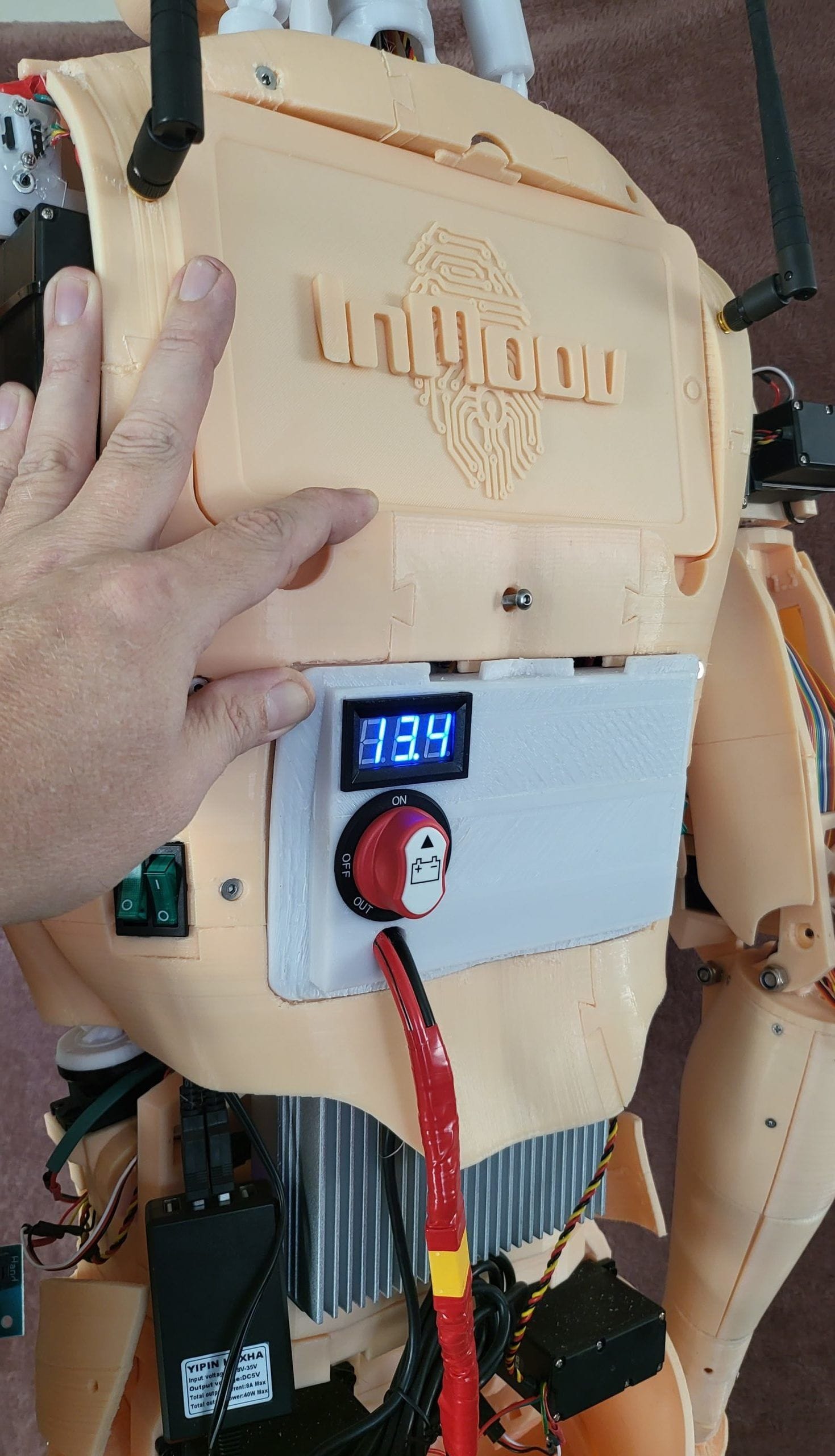
Bob's brain is technically in his back (still working out the latch). He operates on an i5 16GB PC with dual wireless and 128GB SSD which drives the speaker, cameras and microphones, two Arduino Mega and one Arduino Nano. The Arduino boards subsequently drive all 29 servos, LEDs, and sensors.
Bob utilizes MyRobotLab as his primary application running atop Lubuntu 22.04.1 LTS to reduce some overhead. With MyRobotLab at the helm, Bob is capable of completing tasks including: hearing, speech, internet search, MQTT, OpenCV, motor control, gesture control, and more.

Unfortunately Bob currently cannot move by himself. His legs are purely cosmetic and the base upon which he stands is not motorized. More potential in the future to either create a mobile platform or maybe (huge maybe) working legs.
Future
So while I continue to work on Bob's... uh, personality, I have decided what my first major enhancement will be. CyberSyntek has created a very sleek and animated version of the head for InMoov. I am only at the planning stage now but look forward to creating Bob a new friend.
I have some additional thoughts on modifications but will review the existing creations of others first. Ideally I would like all the appendages to be readily swappable to the torso as to increase the ease of any repair or replacement.